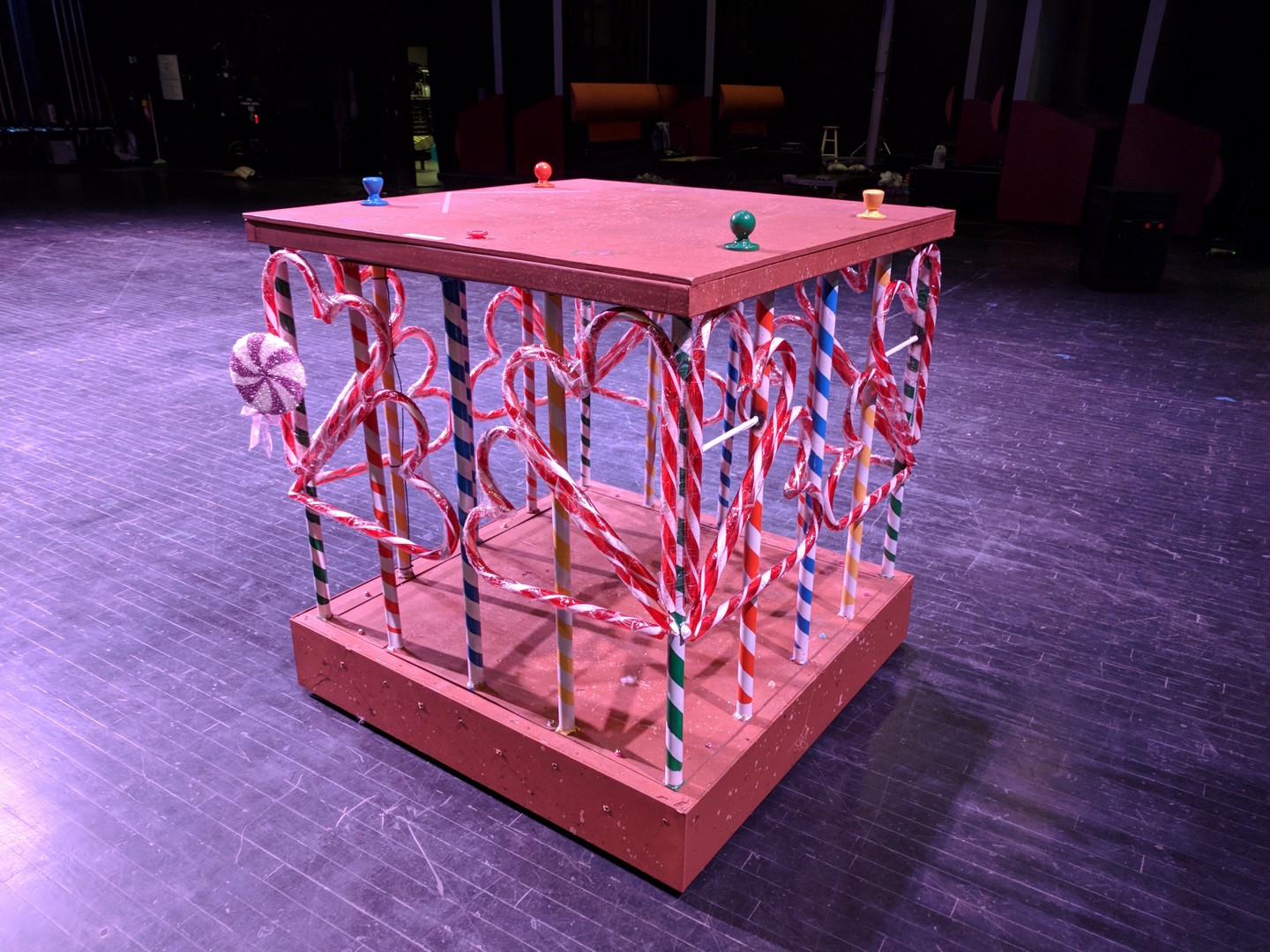
Robotic Cage
Hansel and Gretel
Univeristy of Northern Iowa Opera
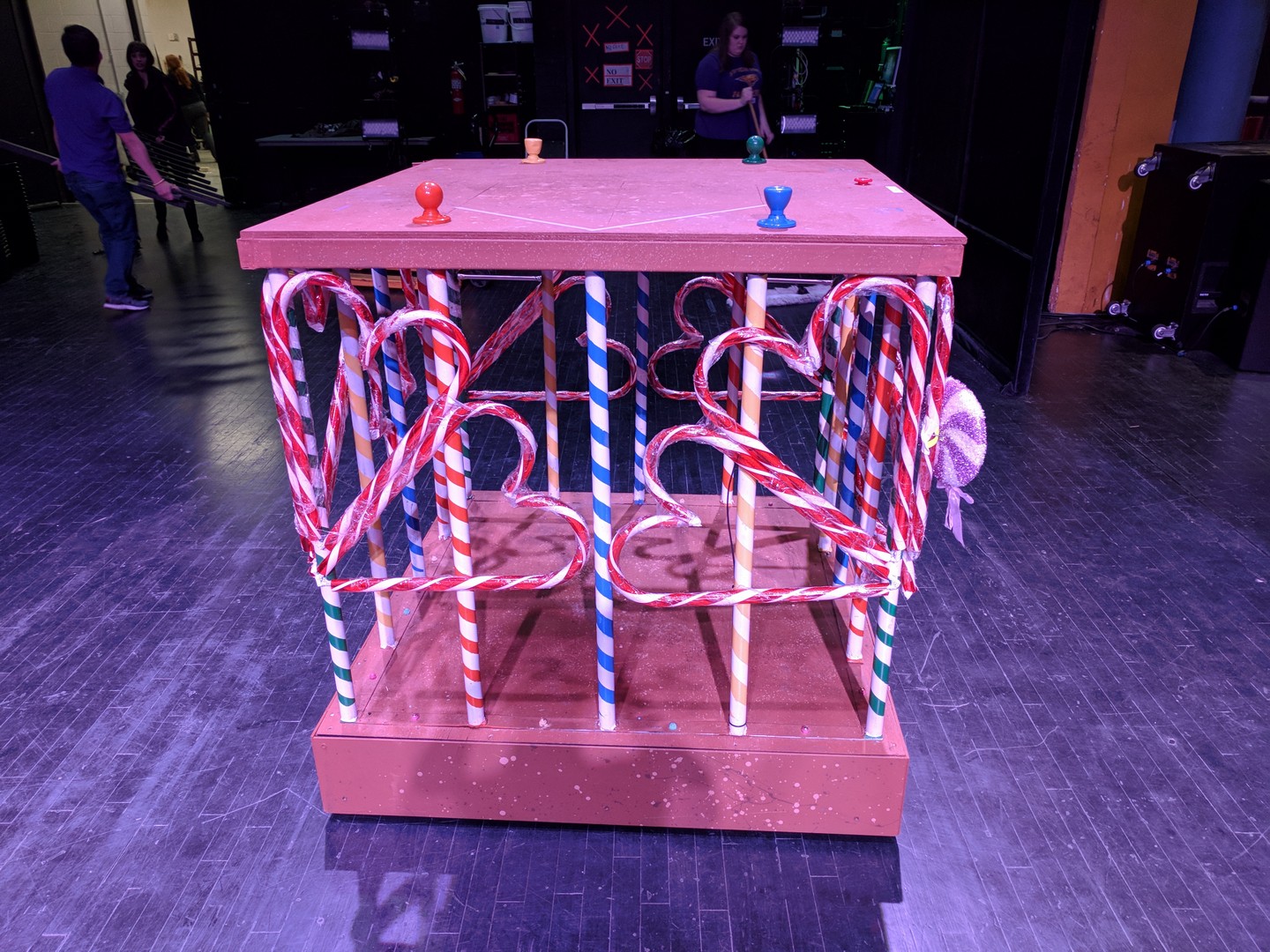
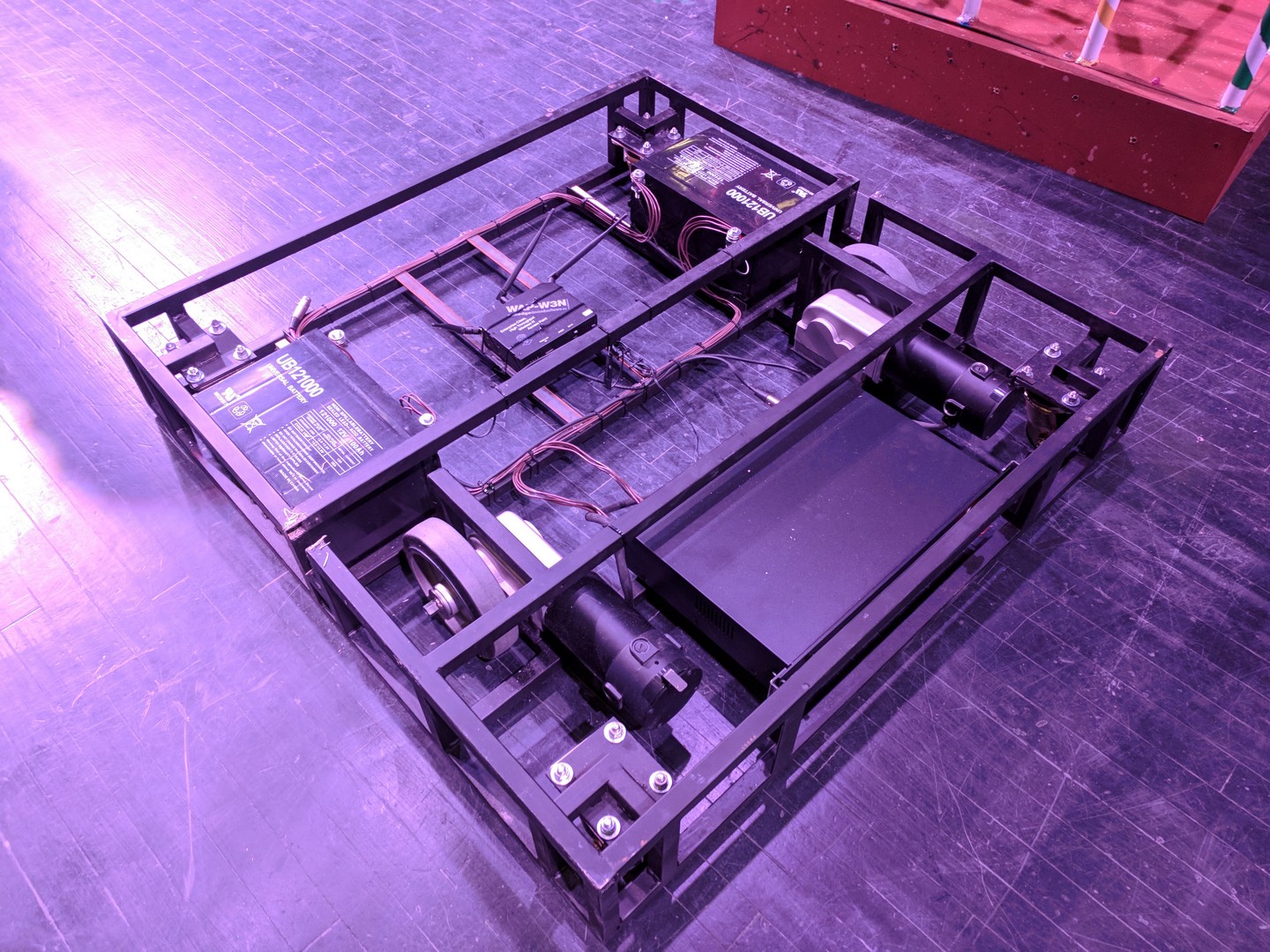
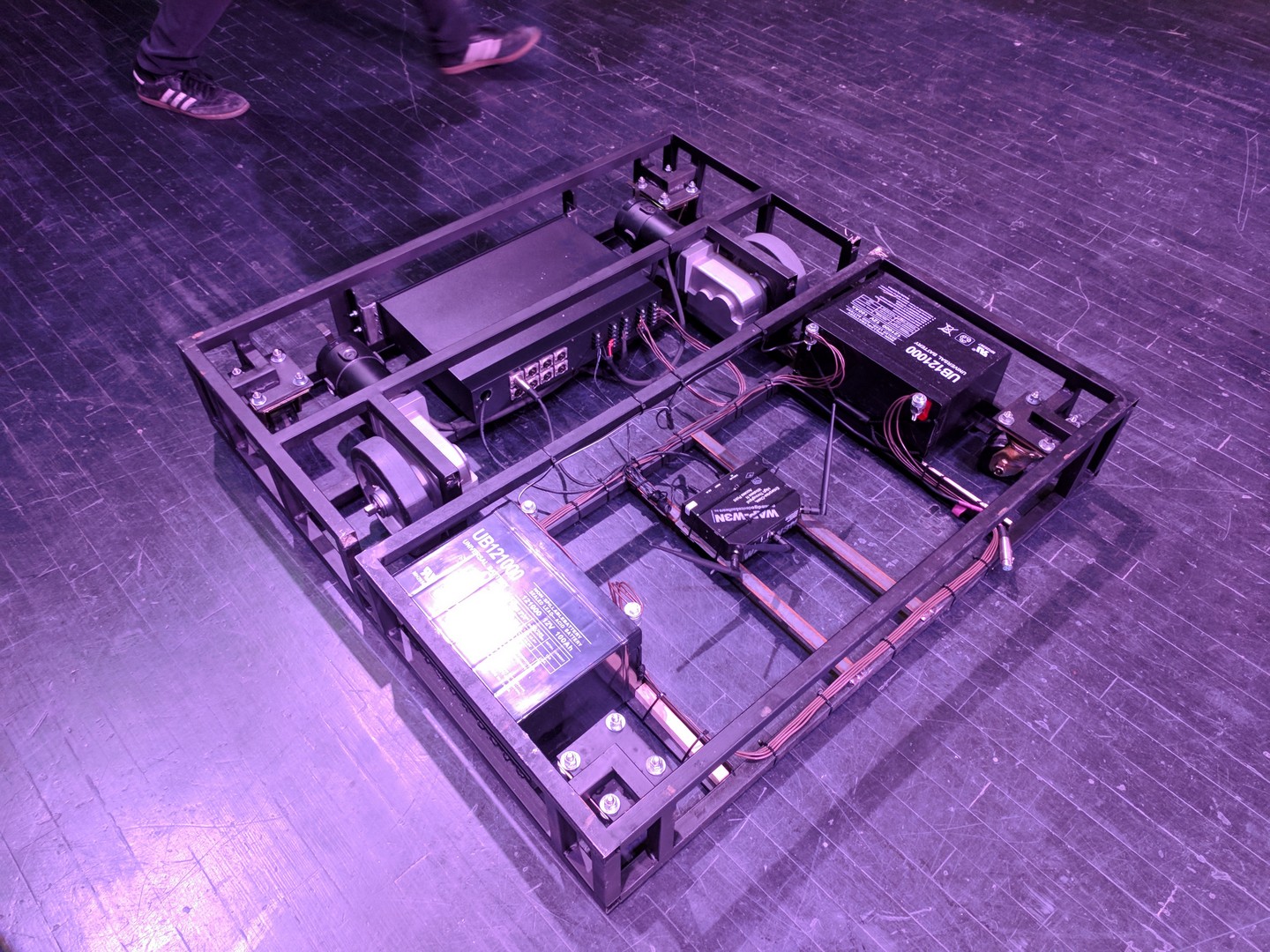
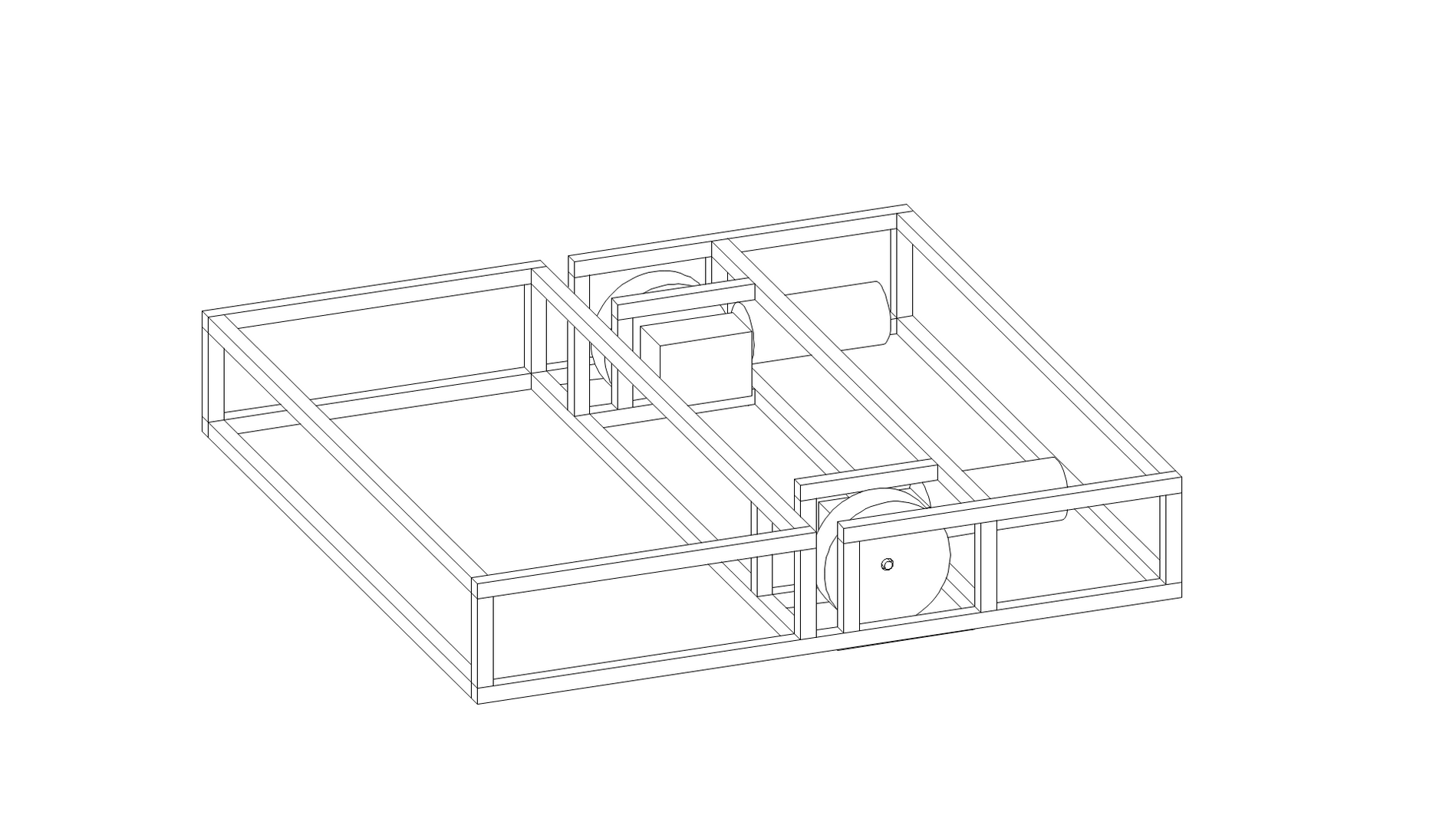
For a performance of the opera Hansel and Gretel the scenic designer/technical director wanted a way to move a four by four foot cage around the stage remotely. The performers would also ride it across the stage. The general construction concept was borrowed heavily from Chris Rybitski at the University from Virginia, however I redesigned and constructed it to fit our needs. I also developed the control system from scratch. The wagon was designed to fit a standard four by four platform.
The system was operated by an off stage technician using an Xbox like controller. The control signals were transmitted wirelessly to a motor driver in the wagon. To account for potential loss of wireless connection, safeties were configured to stop motion if the connection was lost. Emergency stop buttons were also installed in easy to access locations in case the actors onboard ever felt unsafe.
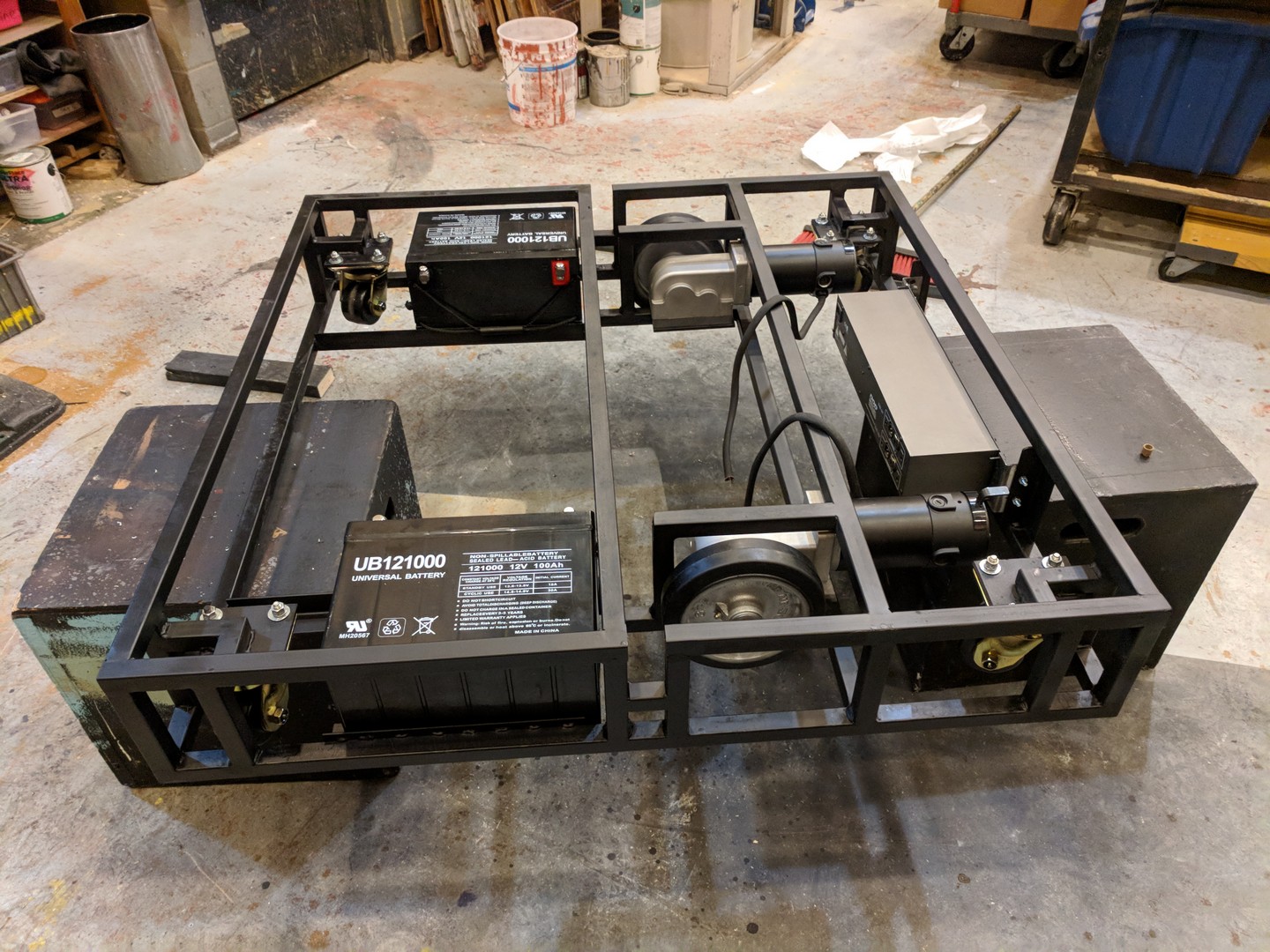
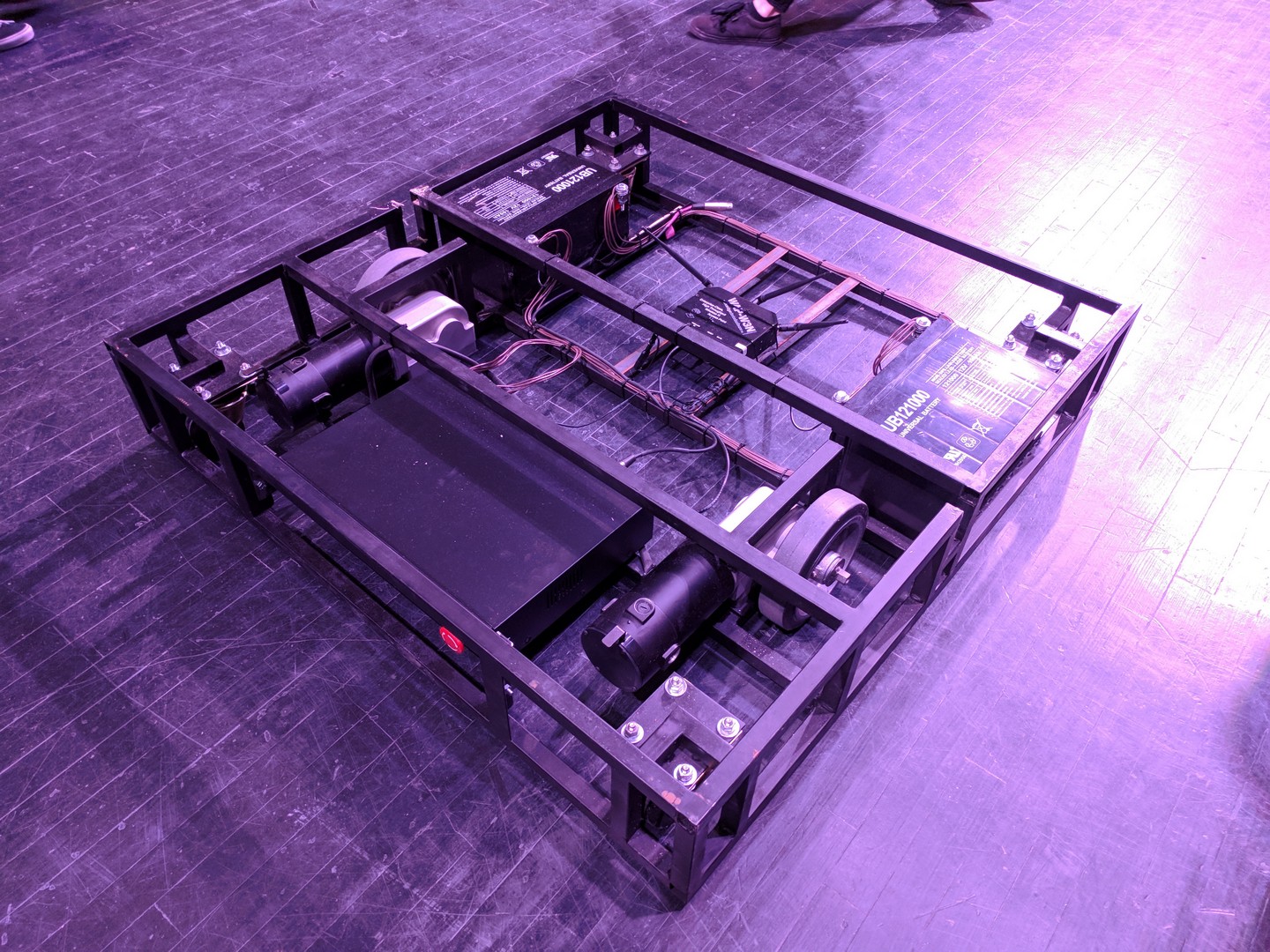
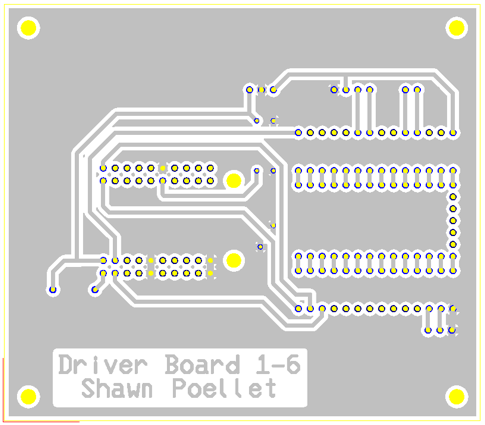
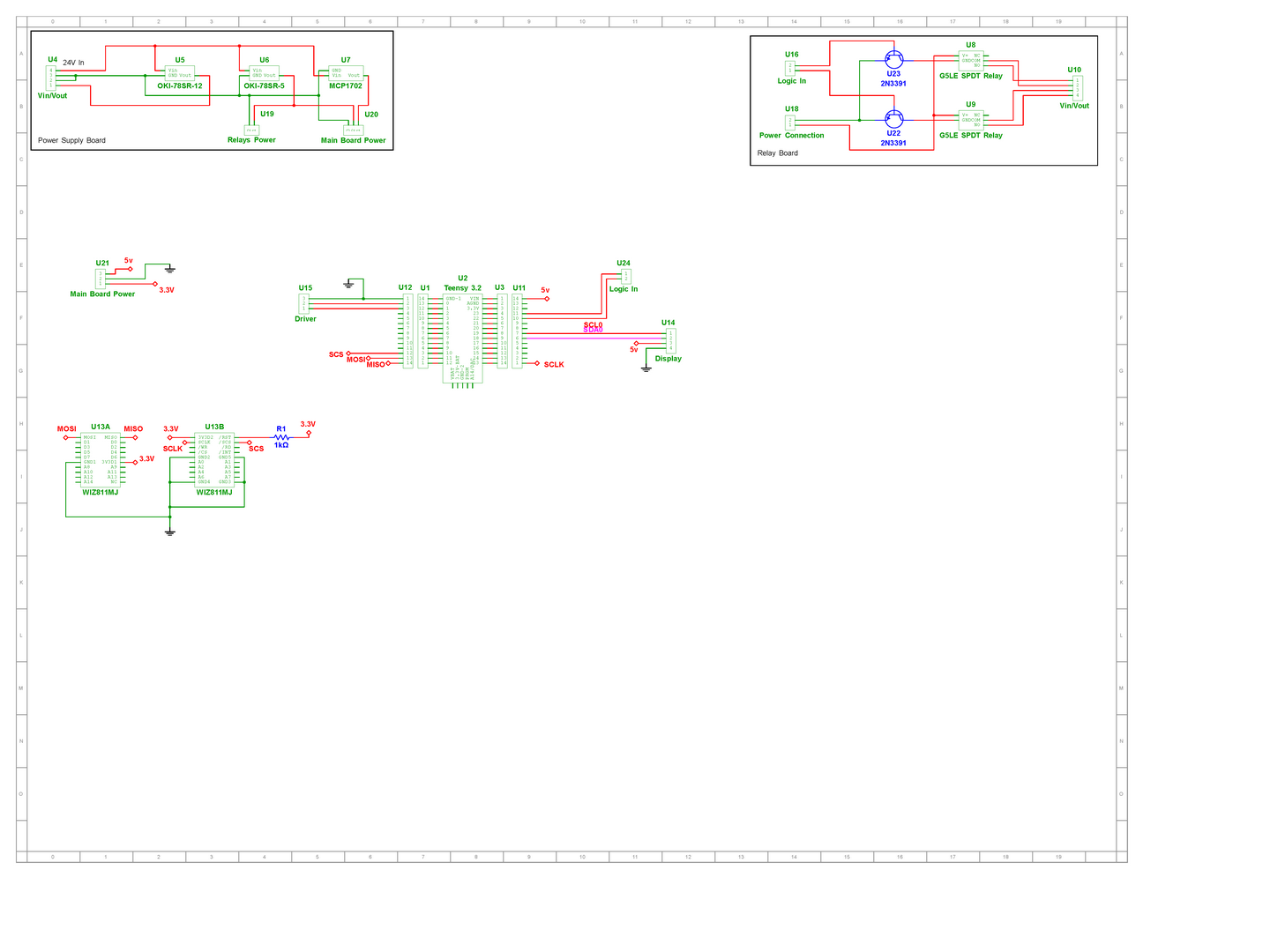
Two 24V DC motors were used for motion. The motor driver was enclosed in a 2U rack mount enclosure for easy installation. The motor driver was powered by a Teensy-3.2 microcontroller. I designed and manufactured the custom PC boards in house.